X-Morph: Human Motion Priors for Scalable Robot Learning Across Morphologies
National University of Singapore
Abstract
Recent progress in humanoid behavior models has been driven in large part by abundant human motion data, but comparable motion data is scarce for non-humanoid legged robots such as quadrupeds, hexapods, and quadruped manipulators. A promising alternative is to repurpose human motion across embodiments; however, direct retargeting often produces motions that are visually plausible yet physically inconsistent or difficult to track under robot dynamics.
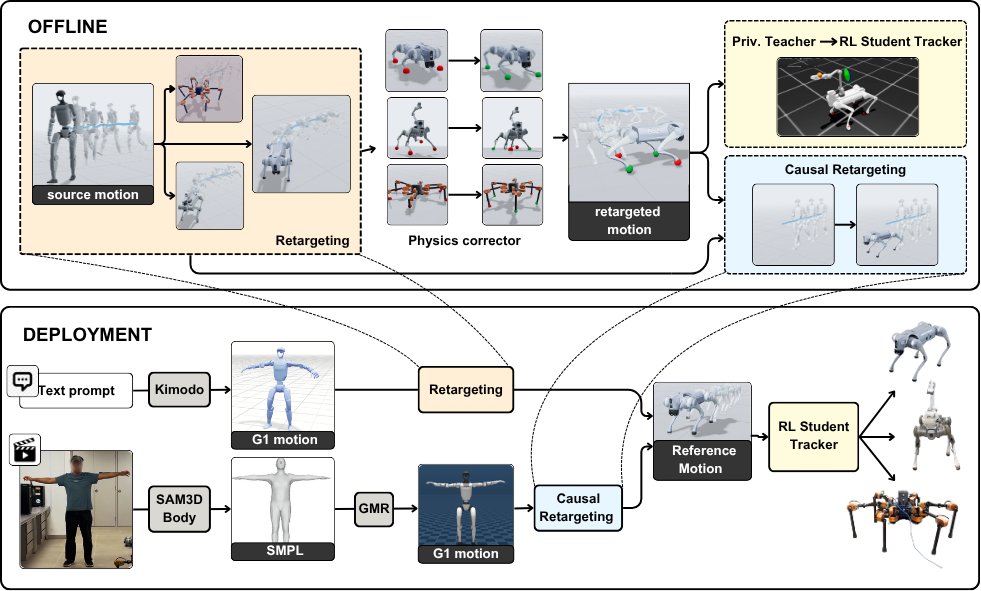
We present X-Morph, a human-motion-to-robot-behavior pipeline that converts human motion into deployable locomotion and loco-manipulation policies for diverse non-humanoid legged morphologies. A cross-morphology retargeting stage converts human motions into kinematically plausible, intent-preserving robot references, which are then tracked by a privileged RL policy and distilled into a causal student policy.
We evaluate X-Morph on three morphologically distinct platforms: a quadruped, a hexapod, and a quadruped equipped with a manipulator. The resulting policies track diverse retargeted motions, generalize to unseen human motions, and support downstream use cases including video-based teleoperation, behavior-prior control, and text-conditioned motion generation. These results suggest that large-scale human motion can serve as a substrate for learning broad, reusable behavior priors beyond humanoid robots.
Live Interactive Demo
Coming soon
A browser-based demo will let visitors explore source motions, target morphologies, and retargeted robot references interactively.
Skills
Locomotion skills from real-time human motion
The same reference interface supports multiple non-humanoid morphologies and hardware behaviors.
Walk
Turn
Squat
Object Interaction
Loco-manipulation and downstream tasks
Retargeted human interaction motions can initialize structured robot trials for later downstream learning.
Moving an obstacle out of the way
Pushing an object
Lifting an object
Downstream door opening
Text-Conditioned Motions
Text-conditioned robot behaviour transfer
Text prompts are converted into G1 motions with Kimodo, then retargeted by X-Morph into robot references and executed with the same tracking policy stack.
Text prompt to robot behavior
Generalization
Retargeting beyond the exact demonstrations
Right-paw manipulation
Go2 manipulation generalizes beyond left-paw-only target demonstrations.
Wide front-leg motions
Yuna produces broader manipulation motions than the narrow target dataset.
BibTeX
Citation will be updated after the paper link is available.
@article{xmorph2026,
title = {X-Morph: Human Motion Priors for Scalable Robot Learning Across Morphologies},
author = {},
journal = {},
year = {2026}
}